Ogni missione nello spazio profondo ha la sua buona dose di momenti emozionanti in mezzo ad un mare di operazioni ordinarie, e la occasionale situazione critica ricorda a tutti che il controllo da remoto di un veicolo spaziale non è per gli ingegneri deboli di cuore. L’atterraggio di Philae sulla cometa, a partire dal suo sgancio da Rosetta, sarà un evento memorabile non solo per le persone direttamente coinvolte, ma per tutti noi.
Introduzione
Nonostante il lancio – apice di anni dedicati alla scrittura di proposte, all’ingegneria dei requisiti, ad innumerevoli riunioni e teleconferenze, alla costruzione e risoluzione di problemi, alle sessioni in camera pulita, ed alle attività di integrazione entro ristrettissime scadenze – sia il momento più emozionante (non dissimile dalla nascita di un essere umano), molte altre tappe offrono un’abbondanza di eventi rischiosi, e ricchi di emozioni, i quali caratterizzano l’unicità di ciascuna missione.
Questo è il dominio delle operazioni di missione, che nel settore spaziale non è del tutto al secondo posto come lavoro dopo quello dell’astronauta. In questo dominio competenza ingegneristica, atteggiamento professionale, audace inventiva e lavoro interdisciplinare, sono le chiavi per assicurare che le operazioni giornaliere procedano il più fluidamente possibile, mentre eventi speciali, o situazioni particolari, siano trattati nel modo migliore per minimizzare i rischi e l’utilizzo di risorse, garantendo altresì operazioni scientifiche ed i risultati.
![]() La missione Rosetta, concepita negli anni ’90 e lanciata nel 2004, è un caso esemplare. Un progetto con due veicoli, composto da un orbiter (Rosetta) e un lander (Philae), ha volato lungo una complessa traiettoria intorno al Sistema Solare con quattro fly-bys di corpi celesti principali (tre volte con la Terra ed una volta con Marte) sfruttando la loro gravità per modificare la propria orbita in modo tale da essere lanciata fino all’orbita di Giove per poi accostarsi al percorso della cometa 64P/CG. Per sopravvivere nel gelo dello spazio profondo ad una distanza pari a quella di Giove dal Sole, senza altra fonte di energia oltre ai suoi enormi pannelli solari, tutti i sistemi di bordo di Rosetta sono stati spenti nel 2011 finché un temporizzatore non li ha riattivati nel Gennaio 2014. I quattro fly-bys e due incontri con asteroidi non reggono il confronto con la tensione nel controllo a terra come quando il team di controllo del volo, i teams scientifici, e tutti noi, aspettavano che l’onda portante apparisse in mezzo al rumore ricevuto dalle stazioni di spazio profondo. Tutto l’impegno in così tanti anni, e le promesse di incredibili scoperte, erano concentrati nelle prestazioni di un piccolo dispositivo temporizzatore e nell’hardware costruito anni prima e in attesa di essere di nuovo alimentato dopo 31 mesi di ibernazione.
La missione Rosetta, concepita negli anni ’90 e lanciata nel 2004, è un caso esemplare. Un progetto con due veicoli, composto da un orbiter (Rosetta) e un lander (Philae), ha volato lungo una complessa traiettoria intorno al Sistema Solare con quattro fly-bys di corpi celesti principali (tre volte con la Terra ed una volta con Marte) sfruttando la loro gravità per modificare la propria orbita in modo tale da essere lanciata fino all’orbita di Giove per poi accostarsi al percorso della cometa 64P/CG. Per sopravvivere nel gelo dello spazio profondo ad una distanza pari a quella di Giove dal Sole, senza altra fonte di energia oltre ai suoi enormi pannelli solari, tutti i sistemi di bordo di Rosetta sono stati spenti nel 2011 finché un temporizzatore non li ha riattivati nel Gennaio 2014. I quattro fly-bys e due incontri con asteroidi non reggono il confronto con la tensione nel controllo a terra come quando il team di controllo del volo, i teams scientifici, e tutti noi, aspettavano che l’onda portante apparisse in mezzo al rumore ricevuto dalle stazioni di spazio profondo. Tutto l’impegno in così tanti anni, e le promesse di incredibili scoperte, erano concentrati nelle prestazioni di un piccolo dispositivo temporizzatore e nell’hardware costruito anni prima e in attesa di essere di nuovo alimentato dopo 31 mesi di ibernazione.
Altro momento emozionante è stato l’avvicinamento finale e l’inizio delle operazioni di prossimità con la cometa. Nonostante ci fossero meno rischi tecnici, ora venivano messe alla prova diverse tecniche di inseguimento e navigazione, e le ultime otto manovre di rallentamento dovevano annullare la velocità di avvicinamento tra il veicolo spaziale e la cometa. La prima immagine ravvicinata del corpo celeste mi avvicinamento ha rivelato una strana forma, né prevedibile né immaginabile, e un misto di stupore e preoccupazione si è diffuso nei teams riguardo la difficoltà dei successivi eventi.
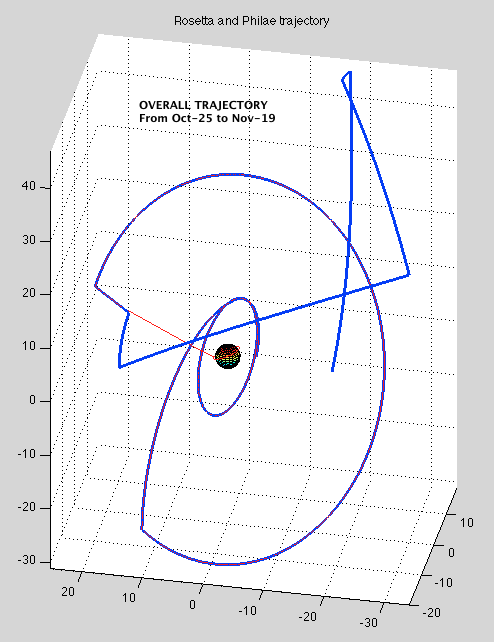
![]() Rosetta con il suo lander incorporato, Philae, stanno orbitando la cometa da Agosto lungo una traiettoria poco convenzionale resa possibile dall’esiguo campo gravitazionale. Più un volo in formazione, che un orbitare, la complessa traiettoria ha reso possibili la mappatura accurata del corpo cometario ed il difficile compito di creare, dalle osservazioni, un accurato modello tridimensionale della forma. L’identificazione di un gran numero di punti di riferimento, usandoli poi per il posizionamento dei luoghi su una topografia così convoluta, è stato un altro successo critico: le abilità necessarie a costruire un database geografico, in così poco tempo, di un corpo sconosciuto, sono state notevoli. Allo stesso tempo, ricercatori hanno proposto un elenco di punti di atterraggio interessanti, che il team di controllo del volo ha valutato fino a selezionarne uno, bilanciando rischi ingegneristici e ritorni scientifici, in base a vincoli quali l’angolo di illuminazione del Sole, la rotazione della cometa, i requisiti di comunicazione, le prestazioni di navigazione, e così via.
Rosetta con il suo lander incorporato, Philae, stanno orbitando la cometa da Agosto lungo una traiettoria poco convenzionale resa possibile dall’esiguo campo gravitazionale. Più un volo in formazione, che un orbitare, la complessa traiettoria ha reso possibili la mappatura accurata del corpo cometario ed il difficile compito di creare, dalle osservazioni, un accurato modello tridimensionale della forma. L’identificazione di un gran numero di punti di riferimento, usandoli poi per il posizionamento dei luoghi su una topografia così convoluta, è stato un altro successo critico: le abilità necessarie a costruire un database geografico, in così poco tempo, di un corpo sconosciuto, sono state notevoli. Allo stesso tempo, ricercatori hanno proposto un elenco di punti di atterraggio interessanti, che il team di controllo del volo ha valutato fino a selezionarne uno, bilanciando rischi ingegneristici e ritorni scientifici, in base a vincoli quali l’angolo di illuminazione del Sole, la rotazione della cometa, i requisiti di comunicazione, le prestazioni di navigazione, e così via.
Tra pochi giorni la missione Rosetta raggiungerà la vetta ingegneristica della missione. Giorni fa una serie finale di cambi di traiettoria ha posto la sonda su una lunga segmento orbitale ricurvo intorno alla cometa per posizionare i veicoli per l’inizio della più critica catena di eventi. Bisogna dire che la missione Rosetta è stata progettata quando ancora ESA non aveva mai orbitato un altro pianeta (aveva effettuato un fly-by della cometa di Halley con Giotto, come sua prima missione di spazio profondo). Mars Express, una sonda costruita a partire dai progetti di Rosetta (in un tentativo, raro e ben riuscito, di contenimento dei costi) divenne la prima missione ESA ad orbitare un altro pianeta nel Natale 2003, subito seguita dalla sorella Venus Express, che entrò in orbita a Venere nel 2006. Entrambe sono state degli apripista per le operazioni orbitali intorno alla cometa, ma ciò che sta per accadere è una volta di più territorio inesplorato: l’atterraggio su un corpo celeste a a 3.4 AU dalla Terra (circa 28 minuti luce). Vediamo gli eventi dei prossimi giorni.
Il momento della verità
La preparazione allo sgancio del lander (LDP, Lander Delivery Preparation) è iniziata 16 giorni prima dell’atterraggio, pianificato per il 12 Novembre, a seguito di un’altra fase chiamata selezione del sito di atterraggio (LSS, Landing Site Selection). All’inizio della LDP Rosetta stava orbitando la cometa a 10 Km di distanza dal suo centro. Il 28 ottobre un primo cambio di traiettoria ha posto Rosetta su un’orbita di trasferimento, seguita il 31 Ottobre da una manovra di cambio di piano e di circolarizzazione che ha posto Rosetta in un’orbita di circa 30X34 Km di raggio. Le variazioni di velocità per queste manovre sono dell’ordine di decine di cm/s (circa 73 cm/s per la prima, e 12 cm/s per la seconda), ben più piccole rispetto alle manovre orbitali a cui siamo abituati intorno alla Terra o un altro grandi corpi planetario. Quest’orbita, con un raggio medio di 32 Km, è stata finora la traiettoria finale prima dell’inizio della fase successiva, la separazione, discesa e atterraggio (SDL, Separation, Descent and Landing).
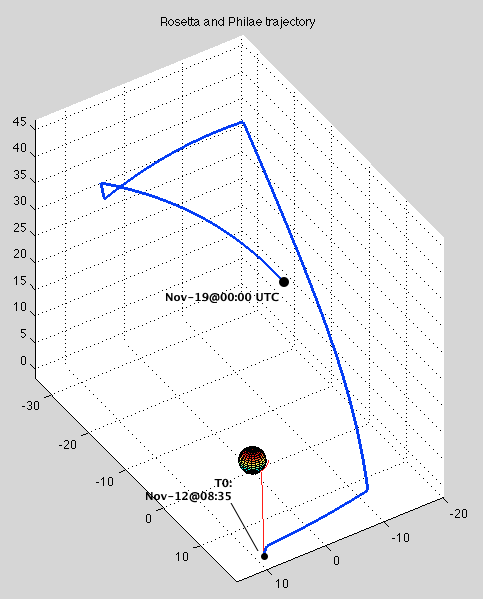
La fase SDL comincia Lunedì 10 Novembre, due giorni prima dell’atterraggio. Da ora in poi tutti gli eventi saranno dati in relazione all’istante, chiamato T0, della separazione del lander, ad oggi ancora pianificato per le 08:35 UTC. Tutti I tempi sono relativi a quando gli eventi accadono a bordo della sonda. Per sapere quando l’informazione di un evento raggiunge la terra bisogna aggiungere il One Way Light Time: il valore è circa 28m20s alla data del 12 Novembre. Per l’orario italiano bisogna aggiungere un’altra ora per la differenza tra UTC e tempo medio dell’Europa Centrale (CET).

T0 – 14.5 ore (18:05 UTC): Questa è la sera prima del giorno dell’atterraggio. Il lander Philae viene acceso attivando anche l’Electric Support System che instrada le comunicazioni al computer di bordo di Rosetta per poi essere inviate a terra. Viene iniziato il riscaldamento fino alla temperatura operativa dei componenti interni.
T0 – 13.5 ore (circa 19:30 UTC): Il primo Go/NoGo viene effettuato dopo l’ultima accurata determinazione dell’orbita dei due veicoli. Questa ultima determinazione orbitale, effettuata utilizzando le stazioni di inseguimento a terra, è ovviamente necessaria per ottenere l’accuratezza richiesta per l’atterraggio e il rapporto degli operatori di dinamica del volo sui risultati sarà critico per decidere se procedere con la sequenza.
T0 – 13 ore (circa 19:35 UTC): Rosetta inizia a ruotare nell’assetto per lo sgancio del lander. Completata la rotazione (40 minuti dopo), dovrebbe essere mantenuto l’assetto inerziale ed al tempo stesso si può comunicare con la Terra.
T0 – 12 ore (20:24 UTC): Il volano interno a Philae viene avviato e portato a regime. Servirà a fornire una stabilizzazione passiva dell’assetto durante la lunga caduta verso il nucleo.
T0 – 9 ore (circa 23:00 UTC): La telemetria di Rosetta viene analizzata e viene eseguito un secondo Go/NoGo per autorizzare la continuazione della sequenza in funzione dello stato del veicolo.
T0 – 8 ore (circa 00:30 UTC): Le sequenze di comandi per lo sgancio del lander vengono caricate su Rosetta.
T0 – 7.5 ore (circa 01:00 UTC): Il terzo Go/NoGo, relativo allo stato delle telemetrie del lander viene eseguito intorno a questo orario. Se tutto va bene entrambe le sonde sono pronte per la SDL con sequenze caricate su entrambi i veicoli in preparazione per le fasi finali.
T0 – 5 ore (04:35 UTC): La sequenza SDL è attivata. Vengono accesi uno ad uno gli strumenti del lander. La distanza dal centro del nucleo è di 29.7 Km.

Da T0 – 3 ore a T0 – 2 ore (tra le 05:35 e le 06:35 UTC): La Manovra Pre-Sgancio (PDM, Pre-Delivery maneuver) viene eseguita producendo un drastico cambio di traiettoria (accensione di 6 minuti, 0,46m/s) spingendo i veicoli in direzione della cometa. La nuova traiettoria, tuttavia, non porterà a colpire il nucleo e se qualcosa dovesse andare storto dopo questa manovra, Rosetta passerebbe vicino alla cometa a circa 3 Km dalla superficie, senza quindi compromettere la missione (questo è uno dei requisiti primari per le traiettorie SDL). Dopo la manovra Rosetta ruota ed assume nuovamente l’assetto per la separazione del lander. Complessivamente, viene perso il contatto con la Terra per circa 40 minuti.
Da T0 – 2 ore a T0 – 1 ora (tra le 06:35 alle 07:35 UTC): In questo intervallo di tempo, in base a quando è stata eseguita la manovra precedente, viene eseguito l’ultimo Go/NoGo basandosi sulle prestazioni della manovra di modifica della traiettoria. Questo sarà il momento del “Go For Landing”. La distanza dal centro del nucleo è di 25.4 Km. Il contatto con la Terra è stato ristabilito e d’ora in poi il team di controllo del volo sarà solo uno spettatore passivo degli eventi gestiti dai due computer di bordo. Sul lander gli strumenti vengono portati nello stato operativo.
T0 – 17 minuti (08:18 UTC): Il sistema meccanico di supporto (MSS, Mechanical Support System) viene acceso. Ha delle viti elettriche che possono separare il lander a velocità programmabili, ed un sistema meccanico a molla di riserva per uno sgancio a velocità pre-fissata.
T0 – 10 minuti (08:25 UTC): Philae viene commutato sull’alimentazione interna e i suoi sistemi di bordo iniziano ad assorbire energia dalla sua batteria principale non ricaricabile (fino ad ora era stato alimentato da Rosetta attraverso un collegamento ombelicale).
T0 – 7 minuti (08:28 UTC): Viene aperto il blocco di sicurezza della fase di crociera per permettere lo sgancio del lander dall’orbiter.
T0 (08:35 UTC): Il lander viene sganciato con una velocità relativa di 21 cm/s. La distanza dal centro del nucleo è 22.54 Km. La velocità prescelta è simile alla velocità di rilascio della riserva meccanica mantenendo dunque una buona alternativa in caso di necessità. La scelta della velocità di separazione è di grande importanza perché produrrà una variazione di traiettoria del lander, ormai in caduta libera. Questa variazione è sufficiente ad alterare la traiettoria del lander, rispetto a quella di Rosetta, in modo tale che il lander ora possa cadere fino sulla superficie della cometa. Rosetta verrà soggetta ad una più piccola, ed opposta, variazione di velocità che allontanerà un poco di più dalla cometa la sua traiettoria.
La sequenza di eventi che ora segue non ha nulla da invidiare ai famosi 7 minuti di terrore della missione MSL/Curiosity. Dalla separazione all’atterraggio passeranno 7 ore durante Ie quali l’assetto di Philae sarà mantenuto grazie alla rotazione del volano posizionato nel centro di gravità del veicolo. Il sistema attivo di discesa (ADS, Active Descent System, basato su getti a gas freddo puntati verso l’alto) non sarà usato durante la discesa.
T0 + 1 minuto (08:36 UTC): Le fotocamere (panoramiche) CIVA ai lati di Philae prendono due serie (la seconda 2 minuti dopo la prima) di immagini di addio di Rosetta salvandole nella memoria interna del lander. Le distanze dall’orbitar dovrebbero essere circa 10 m per la prima serie, e 35 metri per la seconda.
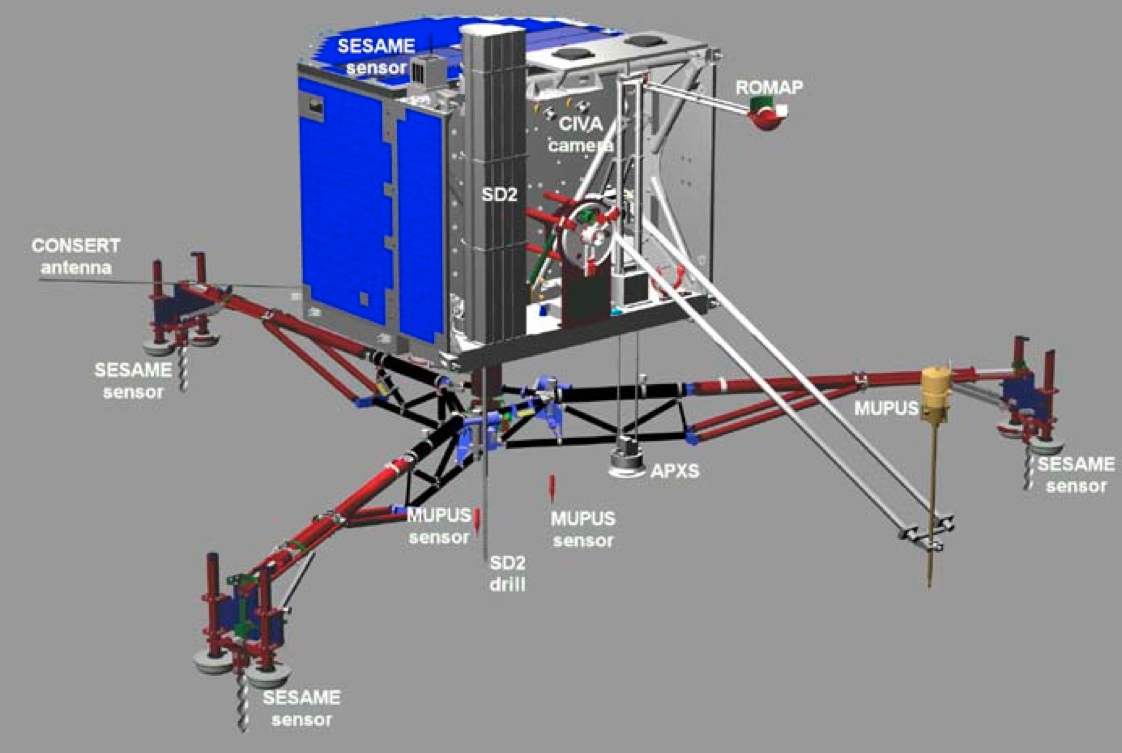
T0 + 8 minuti (08:43 UTC): Philae dispiega il carrello di atterraggio, un’attività che durerà almeno 15 minuti. Successivamente verranno dispiegati le due antenne di CONSERT ed il braccio di ROMAP.
T0 + 22 minuti (08:57 UTC): Philae ruota di 14 gradi intorno a sè stesso per assumere l’orientamento preferito per l’atterraggio (presumibilmente dettato dall’orientazione dei pannelli solari dopo l’atterraggio).
T0 + 40 minuti (09:15 UTC): Rosetta esegue un’altra drastica manovra di cambio di orbita che porrà la sonda in una traiettoria dalla quale il lander sarà sempre in visibilità, in modo da mantenere un contatto radio costante durante la discesa e l’atterraggio. Ulteriori manovre sono già pianificate per mantenere il contatto durante la prima sequenza scientifica (FSS, First Science Sequence). I sistemi di immagine NAVCAM e OSIRIS di Rosetta saranno puntati sul lander per seguirlo durante la fase iniziale della discesa, dopodiché la sonda ruoterà per permettere il contatto radio con Philae.
T0 +1 ora e 50 minuti (10:25 UTC): Rosetta riprende il contatto con la Terra.
T0 + 2 ore (10:35 UTC): Il trasmettitore in banda S di Philae viene acceso e comincia a inviare a Rosetta (per una successiva trasmissione a terra) il contenuto della memoria interna del lander (immagini di addio). La distanza dal centro della nucleo è di 19.4 Km.
Durante la lunga caduta libera, la velocità di Philae rispetto alla cometa aumenterà lentamente sotto l’effetto della gravità, partendo da circa 0.75 m/s fino a circa 1.1 m/s al contatto. Le attività effettuate durante la discesa comprendono:
- utilizzo del radar CONSERT per fornire informazioni di distanza tra lander e orbiter e per dare evidenza che il lander sia “vivo” (in caso di problemi di comunicazione);
- utilizzo del magnetometro ROMAP per acquisire dati scientifici riguardo l’interazione tra vento solare e plasma cometario;
- utilizzo di COSAC e PTOLEMY per campionare l’ambiente della cometa;
- raccolta di particelle di polvere utilizzando SESAME.
La disponibilità del radar CONSERT, che è configurato con un trasmettitore sul lander e un ricevitore a bordo dell’orbiter, è di grande aiuto durante la fase di atterraggio. I dati dal team scientifico di CONSERT saranno integrati con quelle disponibili dal team di controllo del volo in modo che siano disponibili negli scenari nominali e di contingenza che si potrebbero sviluppare. Il radar opera a 100 MHz e verrà usato per studiare la struttura interna della cometa una volta che Philae sarà atterrato.
T0 + 6 ore (14:38 UTC): La fotocamera ROLIS, che punta verso il basso, comincia a acquisire immagini del sito di atterraggio. La distanza dal nucleo è di 17.5 Km. Alcune immagini saranno di tanto in tanto inviate all’orbiter, mentre altre saranno memorizzate a bordo per essere trasmesse dopo l’atterraggio. Il tempo di trasferimento di una singola immagine tra lander e orbiter può essere anche di svariati minuti. Una volta ritrasmesse a Terra da Rosetta, le immagini richiedono un’elaborazione prima di essere rese pubbliche e c’è una possibilità che una di queste immagini sia resa disponibile prima dell’atterraggio.
T0 + 7 ore (precisamente alle 15:34 UTC, con una finestra di 94 secondi): Philae colpirà la cometa a circa 1m/s. Alla detezione Non appena il segnale di contatto viene rilevato su due delle tre gambe, verranno sparati i due arpioni mentre l’ADS attiverà I suoi propulsori verso l’alto per 15 secondi per evitare che il lander rimbalzi dalla superficie (dato che la velocità di discesa è paragonabile alla velocità di fuga dalla cometa). Quando tutte e tre le gambe saranno a contatto con il suolo, apposite viti verranno anche forzate nel terreno. Il continuo collegamento radio tra lander e orbiter fornirà un’immediata conferma dell’atterraggio. Dopo pochi minuti le fotocamere CIVA acquisiranno il primo panorama dalla superficie (l’elevazione del sole sarà circa 55°) e queste immagini, più i dati e le immagini memorizzati a bordo durante la discesa, verranno trasmessi a Rosetta per essere ri-trasmesse a terra. La prima immagine dalla cometa dovrebbe essere disponibile al pubblico intorno alle 17:00 UTC.

Per molti appartenenti al team di controllo del volo, per molti ingegneri e molti scienziati questo evento sarà la fine del momento della verità che marcherà l’esito di una buona parte della loro vita. Anche questa è “exploration at its greatest” (esplorazione al meglio), per citare David Scott, un’esplorazione non solo per la scienza e la conoscenza, ma anche di quello che l’esperienza ingegneristica e la l’abilità tecnica possono fare. Questo è un tipo di esplorazione che ha ben pochi paralleli nel mondo moderno. Questa dovrebbe essere l’essenza di cui dovrebbe essere fatta l’educazione.
Subito dopo
La prima fase scientifica di Philae (FSS) comincierà immediatamente dopo l’atterraggio e durerà circa 5 giorni, in base alla durata delle batterie non ricaricabili di bordo. Tutti gli strumenti verranno attivati in base ad una pianificazione molto complessa vincolata anche dalla limitata memoria di bordo e dalla necessità di trasmettere I dati a Rosetta per la comunicazione a Terra. Saranno cinque giorni molto eccitanti.
Dal punto di vista del team di controllo del volo non ci sarà possibilità di rilassarsi dopo le stressanti settimane dell’atterraggio. Non ci si potrà riposare, ma si dovrà perseverare in questa movimentata fase scientifica, ed al contempo gestire Rosetta che eseguirà un balletto orbitale per rimanere in contatto continuo con il lander.
Dopo che la batteria primaria si sarà scaricata, comincerà la fase scientifica a lungo termine (LTS, Long Term Science), che sfrutterà I pannelli solari (la cui posizione dei quali ha vincolato anche l’assetto di atterraggio di Philae per garantire sufficiente illuminazione solare) ed una batteria ricaricabile separata. Questa fase dovrebbe durare circa 3 mesi e Philae potrebbe durare anche di più, ma probabilmente soccomberà per surriscaldamento circa 4 mesi dopo l’atterraggio.
Dettagli aggiuntivi
Durante questa fase molto critica della missione di Rosetta le comunicazioni saranno garantite da due stazioni di terra dell’ESA, a New Norcia (NNO, Australia) e Malargue (MLG, Argentina), e ridondate da alcune stazioni della Deep Space Network della NASA: DSS-54, DSS-25, DSS-45 e DSS-55. L’atterraggio in particolare sarà seguito da New Norcia, e da DSS-55 e MLG.
Se la missione incorre in un NoGo durante uno dei controlli più critici prima della separazione, l’atterraggio sarà ri-pianificato ad un tempo più favorevole. In ogni altro caso, diverse procedure di contingenza sono disponibili in base alla situazione.
La cometa ruota intorno al proprio asse ogni 12 ore.
Riferimenti:
Programma aggiornato completo dal sito ESA.
Avvertenza
Le informazioni qui riportate riguardo orari ed eventi derivano da diverse fonti in diversi momenti. Non sono completamente accurate. Il processo dinamico di pianificazione SDL ha reso difficile ottenere un programma accurato e definitivo di tutti gli eventi.
Le informazioni orbitali sono invece molto accurate e basate su informazioni che ESOC ha reso disponibili tramite il sito NAIF FTP. I tracciati orbitali sono stati generati usando il Toolkit SPICE del NAIF al JPL. Riconosciamo la loro incredibile partecipazione e interesse per la maggior parte delle missioni nello spazio profondo e la produzione di una delle migliori librerie software disponibili.