![]() A Kourou, Guyana Francese, è tutto pronto per il lancio del Vega che darà inizio alla breve missione dell’Intermediate Experimental Veichle (IXV) dell’ESA. Domani, mercoledì 11 febraio, l’industria spaziale europea vivrà una propria esperienza di volo sperimentale nello spazio, tramite il lancio dell’IXV (Intermediate eXperimenteal Vehicle) su una traiettoria sub-orbitale che ne permetterà un rientro ipersonico liscio (glided) e controllato, seguito dal recupero nell’oceano. Su una scala differente, questa missione è molto simile alla missione Orion di soli due mesi fa, cha ha visto i primi passi degli Stati Uniti in una possibile nuova era di esplorazione (spaziale). La questione di dove la missione IXV porterà l’Europa è interamente differente, ma per l’industria e la comunità scientifica l’esperienza e i dati che verranno raccolti, diverranno un’importante patrimonio per sviluppi futuri. E’ la prima volta che l’Europa prova un rientro atmosferico controllato a Mach 25.
A Kourou, Guyana Francese, è tutto pronto per il lancio del Vega che darà inizio alla breve missione dell’Intermediate Experimental Veichle (IXV) dell’ESA. Domani, mercoledì 11 febraio, l’industria spaziale europea vivrà una propria esperienza di volo sperimentale nello spazio, tramite il lancio dell’IXV (Intermediate eXperimenteal Vehicle) su una traiettoria sub-orbitale che ne permetterà un rientro ipersonico liscio (glided) e controllato, seguito dal recupero nell’oceano. Su una scala differente, questa missione è molto simile alla missione Orion di soli due mesi fa, cha ha visto i primi passi degli Stati Uniti in una possibile nuova era di esplorazione (spaziale). La questione di dove la missione IXV porterà l’Europa è interamente differente, ma per l’industria e la comunità scientifica l’esperienza e i dati che verranno raccolti, diverranno un’importante patrimonio per sviluppi futuri. E’ la prima volta che l’Europa prova un rientro atmosferico controllato a Mach 25.
Il veicolo
L’IXV verrà lanciato sul razzo vettore Vega da Kourou, nella Guyana Francese. Il razzo seguirà una traiettoria molto particolare, a confronto di missioni trasportanti satelliti, immettendo l’IXV in un’orbita altamente ellittica, inclinata di 5,4 gradi rispetto all’equatore e con un apogeo di 412 km ed un perigeo di soli 76 km. Ciò significa che il perigeo si trova entro l’atmosfera e prima che l’IXV completi un mezzo giro attorno alla terra, sarà già giunto il momento del suo rientro. Questa traiettoria è un’ulteriore prova della versatilità del concetto del lanciatore Vega, una versatilità raggiunta anche grazie all’AVUM, il suo 4° stadio riavviabile.
Il retro dell’IXV mostra i 4 propulsori a reazione, disposti in modo da poter controllare tutti e tre gli assi di rotazione. Sotto di essi i due elevoni controllano rollio e beccheggio durante il volo atmosferico. Credits: ESA.
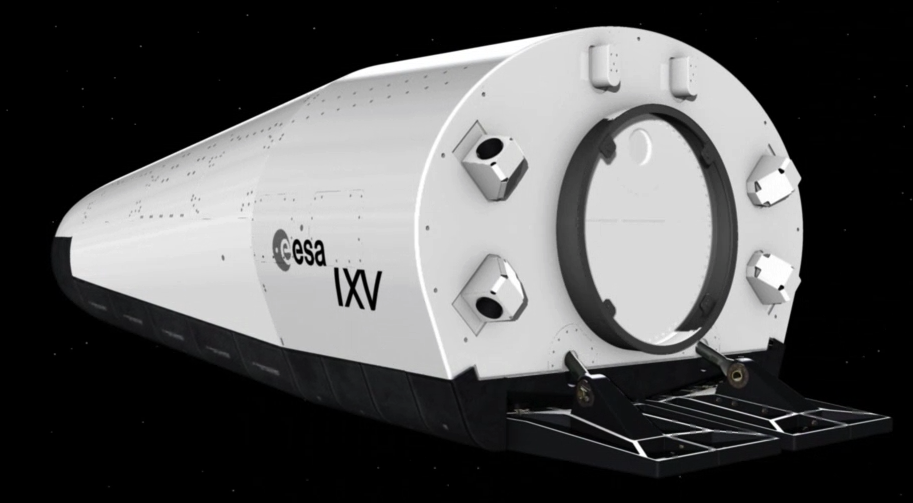
Con un peso al lancio di 1845 kg l’IXV si avvicina alla massima capacità (di spinta) del lanciatore Vega. E’ un veicolo ipersonico sperimentale a corpo portante costruito per l’ESA da Thales Alenia Space Italia, con altri 40 partner europei. E’ lungo circa 5 m, largo 2,2 – e alto 1,5 m e il suo sviluppo è cominciato nel 2002. Con un’efficienza aerodinamica (una portanza su resistenza) di 0.7, le prestazioni aerodinamiche garantiranno un rientro controllato verso la zona designata nell’oceano pacifico. Durante il suo breve ma intenso volo, l’IXV verrà seguito dalle stazioni di terra in Liberville (Gabon), Malindi (Kenya), così come dalla nave di recupero Nos Aries. Ci si può aspettare un periodo privo di contatto, nella regione fra 100 km e 40 km di altitudine, per via del plasma generato dall’attrito con l’aria. Dopo aver decelerato sino al raggiungimento di Mach 2, ad un’altitudine di circa 32 km, l’azionamento di una serie di paracadute muterà il volo in discesa verticale. L’ammaraggio verrà assistito dall’azionamento di galleggianti e seguito da un immediato recupero.
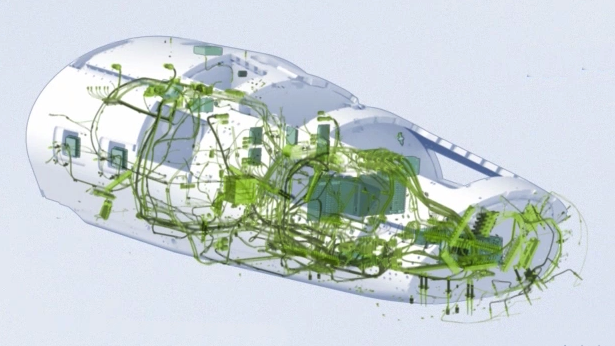
L’avionica di IXV è concentrata nella zona anteriore. I 300 sensori sono però sparsi ovunque come un sistema nervoso del veicolo. Credits: ESA.
Il sistema di controllo dell’IXV usa quattro motori a reazione disposti sulla paratia posteriore del veicolo in modo da fornire momenti di controllo su tutti e tre gli assi. L’orientazione relativa dei quattro motori è tale da permettere, azionandoli a coppie, il controllo di beccheggio, rollio e di imbardata. Per il volo atmosferico, due elevoni sporgenti oltre il retro del veicolo, forniscono una capacità di controllo in rollio e beccheggio. Questi elevoni sono azionati da attuatori elettromeccanici. Tutti i sistemi avionici sono a singola stringa, privi di ridondanza, e vengono controllati da un computer di bordo che deriva i dati di navigazione da un sistema di riferimento inerziale e da un ricevitore GPS. Un esteso sistema di acquisizione di dati telemetrici, derivato dai programmi Vega e Ariane (così come il sistema di riferimento inerziale), viene utilizzato per raccogliere dati da di più di 300 sensori distribuiti nel veicolo per monitorarne gli sforzi termici e strutturali durante il volo. Il veicolo è alimentato a batterie.
Dettagli del profilo di missione
L’intera traiettoria è stata analisi di diversi studi e valutazioni, un merito della flessibilità del lanciatore Vega, che può consentire più profili di missione differenti, a diverse inclinazioni orbitali. Sono stati considerati anche schemi di orbita intera, in quanto l’AVUM può essere impiegato per fornire una propulsione retrograda per l’uscita dall’orbita.
Il profilo di missione finale vedrà il lanciatore Vega portare l’IXV su un’orbita fortemente ellittica, che simulerà una traiettoria di ritorno da una missione verso la Stazione Spaziale Internazionale. Dopo il lancio i primi tre stadi del Vega inseriranno la combinazione AVUM/IXV in orbita. Quindi L’AVUM inizierà una lunga accensione (di quasi 6 minuti) per correggere i parametri orbitali. Alla fine dell’accensione la combinazione AVUM/IXV continuerà il volo orbitale fino alla separazione dell’IXV dal quarto stadio.
L’AVUM, una volta separato IXV, eseguirà altre due accensioni dei motori, una per aumentare la separazione dall’IXV stesso ed una per il rientro controllato nell’atmosfera sull’Oceano Indiano. La missione del lanciatore Vega, al suo quarto volo, finirà con quest’ultima accensione dei motori dell’AVUM.
Nel frattempo, dopo la separazione dell’AVUM, l’RCS (Reaction Control System – sistema di controllo a reazione – che è costituito da 4 motori all’estremo posteriore del veicolo) di IXV viene predisposto per il funzionamento. Subito opo è la volta del sistama GNC di Guida, Navigazione e Controllo, che inizia assumendo il controllo dell’assetto del veicolo. Dopo la separazione dall’AVUM, e prima dell’apogeo, l’IXV sarà continuamente in contatto con le due stazioni di terra africane. Il Centro di Controllo Missione dell’IXV, a Torino, riceverà da queste la telemetria in tempo reale, ma le operazioni di volo saranno completamente sotto il controllo automatico del computer di bordo: il segmento di terra infatti non è provvisto di capacità di comando.
Approssimandosi all’interfaccia di rientro, l’IXV assumerà un assetto cabrato, molto simile a quello adottato dall’Orbiter dello Space Shuttle durante la stessa fase di volo. Infatti, l’intera traiettoria seguita dall’IXV sarà controllata da algoritmi molto simili a quelli usati dall’Orbiter dello Space Shuttle durante il suo rientro ipersonico.

L’IXV durante la fase di rientro ipersonico. Credits: ESA.
La guida dell’IXV punterà verso luogo geografico, ed una altitudine, prestabiliti (posizione dalla quale inizierà la discesa controllata tramite paracadute), e seguirà un profilo funzione dell’attrito (detto drag profile) con l’atmosfera, verificando, ma non controllando, il corretto rateo di discesa. Il controllo funzione dell’attrito sarà attuato agendo sull’asse di rollio, ruotando intorno al quale si può variare l’attrito e correggere anche la traiettoria. Il controllo in beccheggio (modificando, cioè, l’angolo di attacco) non verrà impiegato in questo profilo di rientro, ma supponiamo che un qualche profilo di angolo di attacco sia programmato per la discesa. Il controllo del rollio è inizialmente basato sull’RCS, ma successivamente, già dalle prime fasi del rientro, saranno gli elevoni ad avere autorità e, poiché RCS ed elevoni non è previsto che vengano utilizzati contemporaneamente, molto presto nella fase di rientro il controllo di rollio verrà affidato proprio a questi ultimi.
Durante la discesa, i dati provenienti da più di 300 sensori, verranno registrati a bordo per essere successivamente analizzati a terra. Tra i dati forniti dai vari sensori anche quelli una telecamera termica che mostrerà le variazioni di temperatura lungo una vasta area dei pannelli inferiori dell’IXV (realizzati in fibre di carbonio tessute in una matrice ceramica ad alte prestazioni che garantisce resistenza meccanica ed al calore). Ci si aspetta che l’IXV debba sopportare temperature fino ai 1700°C. Durante la fase di discesa ipersonica un mantello di plasma di aria ionizzata avvolgerà il veicolo, portando ad un blackout delle comunicazioni.
La nave di recupero inizierà a orientare le antenne verso la posizione attesa dell’IXV finché non saranno nuovamente acquisiti i segnali. Al momento dell’acquisizione gran parte del profilo di rientro sarà già stato completato ed il monitoraggio sarà focalizzato sulla complessa sequenza di decelerazione, eseguita mediante una serie di quattro paracadute (pilota, supersonico, subsonico e principale), mentre verranno ricevute le coordinate di atterraggio stimate dal sistema GNC del veicolo.
La sequenza di apertura dei paracadute rallenterà l’IXV da una velocità supersonica (circa Mach 2) fino al regime subsonico e all’ammaraggio. L’intera sequenza è stata collaudata nel Giugno 2013 con un modello dell’IXV fatto cadere da 3 km di altitudine nel Mar Tirreno, al largo delle coste della Sardegna. Il sistema di galleggiamento è stato collaudato anch’esso nella stessa occasione. Pare sia possibile assistere in diretta alle ultime fasi di discesa dell’IXV grazie alle videocamere della nave di recupero. A seguito del recupero dell’IXV da parte della nave di supporto Nos Aries, il propellente residuo degli RCS (idrazina) sverrà svuotato e gestito in modo sicuro.
Il pdf allegato fornisce una sequenza temporale esaustiva degli eventi dell’intera missione.
 IXV_Timeline_Full.pdf (752.3 KiB, 1,315 hits)
IXV_Timeline_Full.pdf (752.3 KiB, 1,315 hits)
Attenzione. BIS-Italia seguirà l’evento in stretta cooperazione con Altec SpA, la compagnia responsabile per la sezione terrestre e le operazioni di volo di IXV. Domani, in esclusiva, vi aggiorneremo direttamente dal centro di controllo missione, a Torino.
Ringraziamo l’ing. Alessandro Bellomo, di Altec SpA, e l’ing. Gianfranco Santoro, di ThalesAleniaSpace-Italia, per l’assistenza fornita a così breve distanza dall’inizio della missione.
(Traduzione dall’originale in inglese di Matteo Micheli ed Alessandro Menchinelli).