E’ stata una stupenda coincidenza quella del 14 Luglio. Quando molti stavano trattenendo il respiro per New Horizons, ed il primo incontro ravvicinato dell’umanità con l’ultimo avamposto del Sistema Solare, Plutone, si celebrava anche il cinquantesimo anniversario, preciso al giorno, della prima esplorazione di successo di un altro pianeta. Infatti, il 14 Luglio del 1965 (e quasi alla stessa ora UTC di New Horizons), la sonda automatica Mariner IV, eseguiva il primo fly-by del pianeta rosso inviando a terra misurazioni e 21 granulose, ma preziose, fotografie che sconvolsero le aspettative degli scienziati e l’immaginazione di tutta l’umanità.
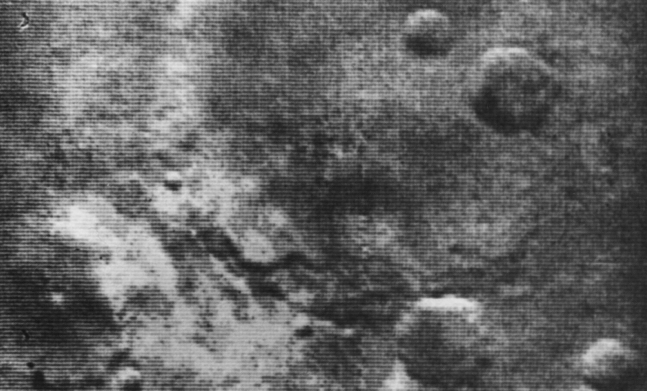 La sorpresa era che Marte non aveva nè canali, nè vegetazione, ed era costellato di crateri, quasi come la Luna. Non aveva un campo magnetico degno di nota (e dunque era esposto dalle radiazioni solari) e l’atmosfera era gelida e rarefatta. Niente tracce di civiltà aliene, ovviamente, e neanche speranze di una facile esplorazione da parte dell’umanità. La conoscenza ravvicinata permise di riscrivere, come si suol dire, i libri di testo, e questo è avvenuto ogni volta che ci siamo portati fino al successivo corpo del Sistema Solare, in un processo continuo di crescita detto anche “esplorazione”.
La sorpresa era che Marte non aveva nè canali, nè vegetazione, ed era costellato di crateri, quasi come la Luna. Non aveva un campo magnetico degno di nota (e dunque era esposto dalle radiazioni solari) e l’atmosfera era gelida e rarefatta. Niente tracce di civiltà aliene, ovviamente, e neanche speranze di una facile esplorazione da parte dell’umanità. La conoscenza ravvicinata permise di riscrivere, come si suol dire, i libri di testo, e questo è avvenuto ogni volta che ci siamo portati fino al successivo corpo del Sistema Solare, in un processo continuo di crescita detto anche “esplorazione”.
Detto questo, è interessante fare un confronto sull’evoluzione tecnologica che in soli 50 anni (che effettivamente sono 40, considerando gli anni di viaggio di New Horizons) ha portato dal Mariner IV a New Horizons. Una stupenda frase in un articolo dell’epoca dice:
“The Mariner design philosophy embodies the concept of a spacecraft which is independent, self-sufficient, and 100 percent reliable”.
Ebbene, questa descrizione oggi la si potrebbe applicare perfettamente a New Horizons e ad altre missioni, ma ovviamente le differenze sono sostanziali. Rimandando all’articolo sull’architettura di New Horizons per i dettagli su questa sonda moderna, analizziamo in questo articolo un aspetto caratteristico di ogni sonda interplanetaria, il comando e controllo del veicolo, e vediamo come era stato realizzato nel Mariner IV.
 Suddivisione funzionale
Suddivisione funzionale
Le funzioni di comando e controllo sono divise tra più blocchi funzionali.
In primo luogo troviamo il Command Detector ed il Command Decoder, entrambi parte del sistema di ricezione. Senza entrare troppo nel loro dettaglio, queste funzioni riconoscono ed estraggono dal segnale ricevuto i comandi lunghi 26 bit. Ci sono due tipi di comandi: i comandi diretti ed i comandi quantitativi. I comandi diretti generano la chiusura momentanea di uno o più contatti a bordo del veicolo. I comandi quantitativi contengono una valore a 11 bit (più altri bit di identificazione) che viene trasferito al CC&S (Central Computer and Sequencer).
Per quanto riguarda la gestione delle telemetrie, questa fa parte del sistema di trasmissione ed ha quattro modalità operative. Nel Modo 1 vengono trasmessi ciclicamente solo dati ingegneristici. Nel Modo 2 vengono trasmetti alternativamente dati ingegneristici e dati scientifici (intesi con quesi i vari sensori, ma non la telecamera), ed è usato durante la fase di crociera. Nel Modo 3 vengono trasmessi solo dati scientifici, e viene usato durante la fase del fly-by (cioè nella encounter sequence). Nel Modo 4 vengono trasmessi i dati registrati durante il fly-by in un registratore di bordo, occasionalmente aggiungendo un blocco di dati ingegneristici. Sono disponibili due data rate: 33.3 bps e 8.3 bps (esatto, si tratta di bit per secondo), selezionato automaticamente in base alla distanza dalla Terra.
In definitiva allora il cuore del sistema di comando e controllo è costituito dai due blocchi successivi: il CC&S (Central Computer & Sequencer) e il DAS (Data Automation Subsystem). Il primo gestisce l’intera missione del veicolo, mentre il secondo gestisce l’acquisizione dei dati scientifici durante la fase del fly-by. E’ interessante notare che questa divisione di ruoli, gestione del veicolo e gestione degli strumenti scientifici, si ritrova anche in missione successive (non solo i Mariners, ma anche i Voyagers, e così via) e la si può identificare in parte anche in New Horizons che ha un computer dedicato alle funzioni GN&C ed uno dedicato a tutto il resto.
Vediamoli con maggior dettaglio.
Central Computer and Sequencer
Il termine Central Computer è a tutti gli effetti sproporzionato per le funzioni di cui si parla (persino per quell’epoca era decisamente sproporzionato). Si tratta nell’insieme di un sistema di logica combinatoria e sequenziale gestito da diverse temporizzazioni generate da un oscillatore di riferimento a 307.2 KHz, particolarmente stabile da garantire un preciso conteggio del tempo dal lancio e fino alla fine della trasmissione a Terra dei dati registrati durante il fly-by. In pratica la frequenza dell’oscillatore, divisa più volte, genera dei segnali di sincronizzazione usati per molti scopi. Tra questi troviamo l’esecuzione di determinate fasi del volo, alcune delle quali ripetibili.
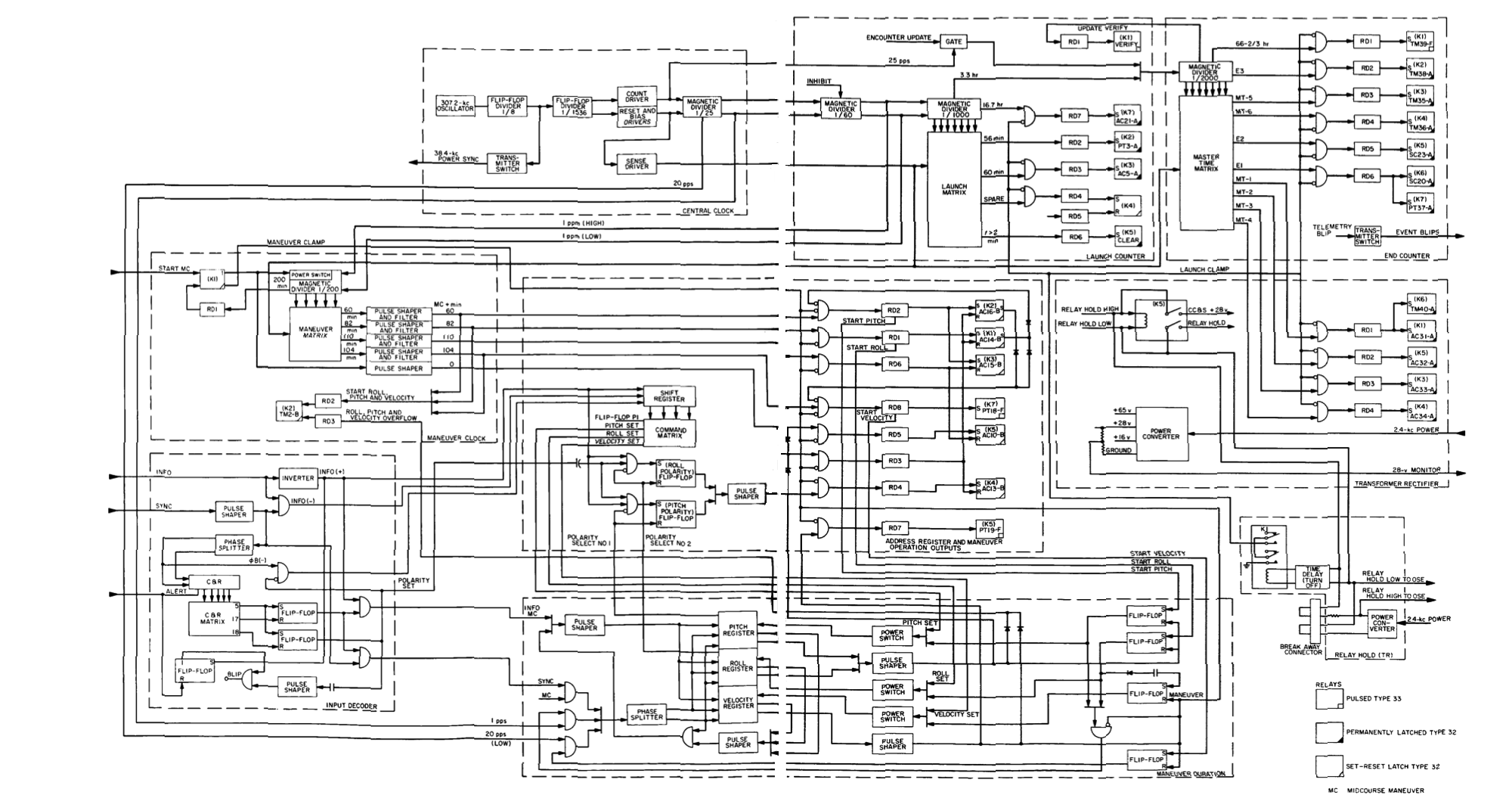
L’immagine è stata composta da due diverse scansioni. Non combaciano perfettamente ed è stata lasciata una piccola separazione per maggiore chiarezza.
Queste fasi sono realizzate a livello logico come delle sequence pre-fissate alcune delle quali con dei parametri regolabili (che ovviamente potevano essere impostati a terra prima del lancio, come l’aggiustamento dell’inizio della encounter phase in funzione della data di lancio, o in volo, tramite i comandi quantitativi). Nello schema si notano il blocco logico che genera la sequenza di comandi necessari durante e dopo il lancio (vedi la launch Matrix), quello che controlla l’esecuzione di tre correzioni di rotta (vedi Maneuver Matrix), ed il blocco che gestisce le condizioni normali, come il volo in crociera (vedi Master Time Matrix). Ma allora, dove sono il controllo di assetto e la gestione della sequenza scientifica del fly-by?
Per quanto riguarda quest’ultima, questa è gestita dal DAS di cui parleremo tra poco. E’ importante notare però che la sequenza è comandata dal CC&S che mantiene un conteggio del tempo con una risoluzione di 6.6 ore a partire dal momento del lancio. Questo conteggio serve per definire la finestra del fly-by che inizia 6.6 ore prima e finisce 6.6 ore dopo, con l’inizio della trasmissione a terra dei dati registrati. In definitiva l’inizio della encounter sequence era prefissato e legato all’istante del lancio.
Per quanto riguarda il controllo di assetto, questo era gestito interamente a parte nel sottosistema di controllo di assetto. Era indipendente da quanto gestito dal CC&S e si basava su un trucco di cui parleremo più avanti, perché merita un discorso a parte.
In definitiva il CC&S è un sistema che gestisce diverse sequenze temporizzate, tutte pre-definite e la cui logica è addirittura cablata, non molto diversamente da come si farebbe con un timer per lavatrici. La differenza è che tutto deve funzionare perfettamente e che non ci sono unità ridondate: il CC&S era costruito con tecniche particolari ad alta affidabilità e proprio in queste missioni la NASA ha iniziato a introdurre concetti relativi alla selezione accurata dei componenti, alle statistiche di affidabilità e così via, aprendo la strada per i metodi di progetto che usiamo ancora oggi per le missioni spaziali. L’unica ridondanza è che da Terra si potevano inviare gli stessi comandi che il CC&S doveva generare. In caso di guasto completo, era pensabile di attivare i sottosistemi, come il DAS, ed eseguire comunque la sequenza scientifica.
Data Automation Subsystem
Volendo essere pignoli, anche il termine automation è un po’ esagerato, ma solo se lo si confronta con l’uso normale che si fa oggi dello stesso termine. Il DAS è definito come il sistema nervoso centrale del sottosistema scientifico e si divide in due sezioni: il DAS in tempo reale (DAS-RT) ed il DAS non in tempo reale (NRT).
 Il DAS-RT viene usato per la raccolta di dati dagli strumenti scientifici (cioè non la telecamera) ed ha tre modi di funzionamento: per la fase di crociera, per la calibrazione e per la fase del fly-by. La differenze tra le tre fasi è la generazione della relativa telemetria e la sua combinazione con la telemetria ingegneristica. Anche l’entità dei dati trasmessi cambia a seconda del modo operativo.
Il DAS-RT viene usato per la raccolta di dati dagli strumenti scientifici (cioè non la telecamera) ed ha tre modi di funzionamento: per la fase di crociera, per la calibrazione e per la fase del fly-by. La differenze tra le tre fasi è la generazione della relativa telemetria e la sua combinazione con la telemetria ingegneristica. Anche l’entità dei dati trasmessi cambia a seconda del modo operativo.
Il DAS-NRT viene usato durante la encounter phase e gestisce l’intera sequenza di acquisizione prestabilita per il fly-by usando i dati provenienti dal DAS-RT e attivando anche la telecamera. Quest’ultima è proprio una telecamera con un sensore a scansione, chiamato vidicon (un componente ormai storico e protagonista di moltissime delle prime missioni spaziali). Il DAS-NRT gestisce anche il trasferimento dei dati acquisiti, sia scientifici che video, al registratore a nastro, per la successiva fase di ritrasmissione a terra.
Il sistema video produce non solo immagini digitalizzate, campionate a 6 bit, una ogni 24 secondi (il sistema è a scansione lenta), ma anche un segnale di presenza del pianeta nel campo visivo. Questo segnale è usato anche per iniziare la scansione di una piattaforma orientabile (con un unico asse di libertà) su cui erano montati tutti i sensori in modo da mantenerli il pianeta nel loro campo visivo. La piattaforma poteva fare una scansione di 180 finchè il pianeta non era visualizzato. La scansione era perpendicolare alla traiettoria di volo e dunque a tutti gli effetti sia aveva una scansione completa su due assi fino a quando l’identificazione non dava l’avvio all’acquisizione delle immagini.
Il concetto di piattaforma orientabile (invece che orientare l’intero satellite come si fa spesso oggi) è stato incorporato in altre missioni del JPL, tra le quali i Voyagers con la loro Scan Platform addirittura distante dal veicolo.
Controllo di assetto
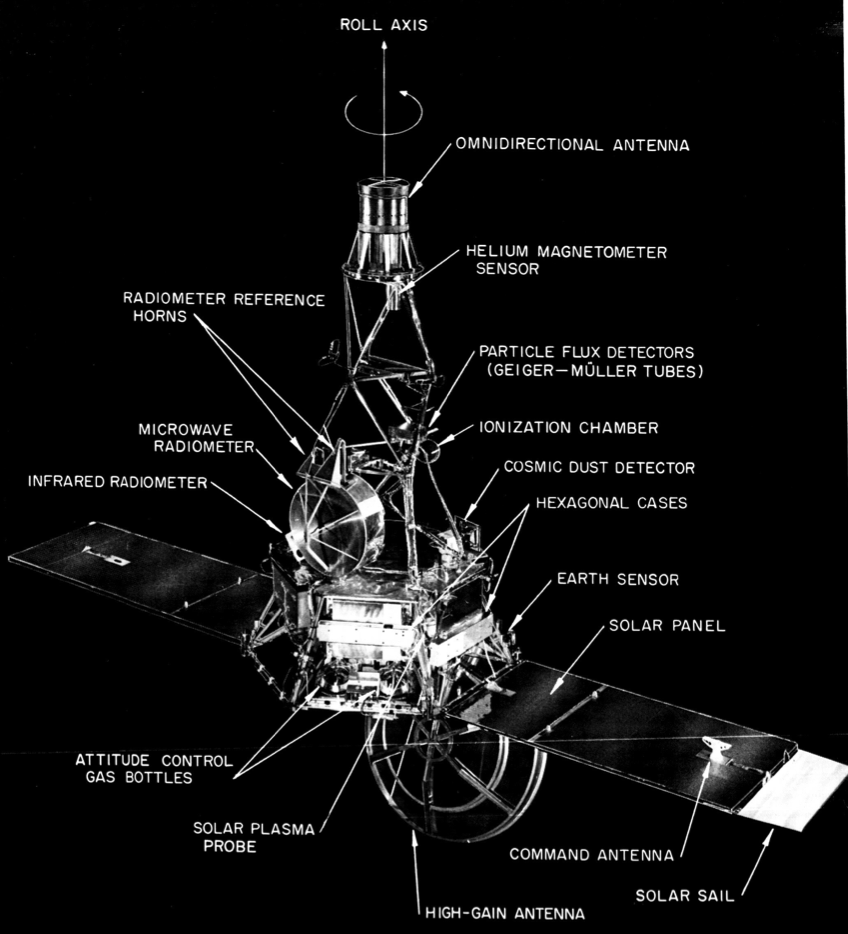
Terminiamo questa carrellata, che non ha toccato moltissimi altri argomenti di interesse e che meriterebbero una discussione più approfondita, con il sottosistema per il controllo di assetto che, come dicevamo prima, si basa su un trucco. Il trucco è questo: durante l’intera missione l’assetto della sonda è sempre lo stesso, ovvero è fissato in base a due riferimenti. Per gli assi di imbardata e beccheggio l’orientamento si fa rispetto al Sole, il che permette di esporre i pannelli solari verso lo stesso, e di puntare l’antenna in direzione della Terra. Per l’asse di rollio si usa una stella come riferimento, ma non una qualsiasi, bensì la stella Canopo, una particolarmente luminosa del cielo australe.
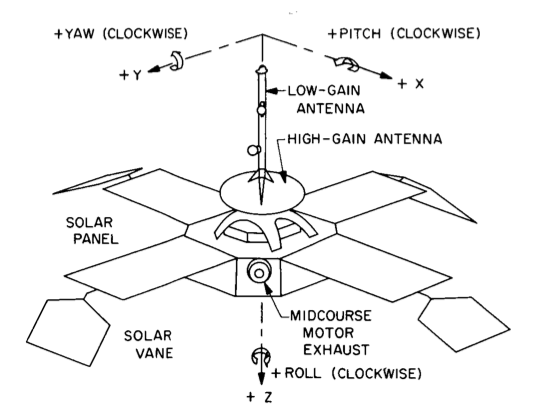 Ci sono diversi aspetti interessanti in questo trucco. Uno è che la traiettoria eliocentrica percorsa dal Mariner IV (che non è una traiettoria di Hohmann perché non si vuole entrare in orbita intorno a Marte e si vuole ridurre il tempo di transito, come si è fatto con New Horizon d’altra parte) è tale che la posizione angolare della Terra rispetto al Sole è praticamente costante per l’intera missione. Questo permette di puntare il Sole e avere un’antenna fissa ad un certo angolo per una comunicazione costante. Un altro è che sui due assi controllati tramite il Sole si può agire con dei pannelli riflettenti (Solar Vanes) per mantenere l’assetto usando la pressione di radiazione solare, senza uso di propellente.
Ci sono diversi aspetti interessanti in questo trucco. Uno è che la traiettoria eliocentrica percorsa dal Mariner IV (che non è una traiettoria di Hohmann perché non si vuole entrare in orbita intorno a Marte e si vuole ridurre il tempo di transito, come si è fatto con New Horizon d’altra parte) è tale che la posizione angolare della Terra rispetto al Sole è praticamente costante per l’intera missione. Questo permette di puntare il Sole e avere un’antenna fissa ad un certo angolo per una comunicazione costante. Un altro è che sui due assi controllati tramite il Sole si può agire con dei pannelli riflettenti (Solar Vanes) per mantenere l’assetto usando la pressione di radiazione solare, senza uso di propellente.
La separazione del sistema di controllo di assetto dal resto dei sotto-sistemi la troviamo anche in diverse altre missioni del JPL, come nel caso dei Voyagers ed il loro Attitude and Articulation Control System usato anche per gestire il puntamento della Scan Platform menzionata prima.
Per l’esecuzione di una manovra di correzione è possibile alterare l’assetto di crociera con i razzi di assetto, misurando lo spostamento mediante giroscopi angolari (o rate gyros) per poi tornare all’assetto originale con una completa ri-acquisizione dei riferimenti. La manovra è controllata dal CC&S, tramite una delle sue sequenze pre-impostate, ma parametrizzate mediante comandi. L’intero sistema di controllo di assetto è semplicemente attivo quando alimentato, e la sua alimentazione è comandata dal CC&S dopo un certo intervallo di tempo dal lancio. Durante una manovra viene spento e per il ritorno all’assetto di crociera viene semplicemente ri-acceso.
I due sensori del controllo di assetto sono veramente geniali. Il sensore di sole (Sun Sensor) è semplicemente composto da diverse fotoresistenze: due sono usate dopo l’acquisizione per il mantenimento dell’assetto, mentre sei sono disponibili durante la fase di ricerca del Sole. Il sensore di Canopo (Canopus Sensor) è invece basato su un’ottica dedicata ed un tubo fotomoltiplicatore che converte il segnale luminoso in segnale elettrico. Il sensore viene attivato solo dopo che il Sole è stato acquisito per evitare di danneggiarne il tubo fotomoltiplicatore. Poichè era possibile che il sensore di Canopo, un antesignano (forse addirittura il primo) dei sensori stellari di oggi, si “agganciasse” su un’altra sorgente luminosa (non il Sole ovviamente), da Terra era possibile definire una “finestra temporale” che abilitasse il sensore in un intervallo specifico della rotazione per la ricerca della stella, diminuendo la possibilità di errore (a Terra era possibile vedere ricevere il segnale presente all’uscita del sensore).
Per terminare, va notato che entrambi i sensori non richiedono alcuna logica per funzionare: si tratta di sistemi contro-reazionati attivati in determinati istanti di tempo che producono un segnale di errore usato a sua volta per azionare i getti di assetto. In pratica stiamo parlando di un sistema completamente analogico. Il sistema prevede una fase di acquisizione, controllata tramite i giroscopi angolari che permettono di definire delle rotazioni di scansione, prima per il Sole e poi per la stella Canopo. Dopo l’acquisizione si passa ad una fase di mantenimento con diversi cicli, e ratei, di controllo.
Conclusioni
Analizzare le tecnologia delle missioni spaziali di qualche decennio fa non è archeologia, ma è ripercorrere la genesi di un processo ingegneristico che permette oggi di realizzare satelliti sempre più complessi, efficienti e di lunga durata. Le lezioni e le soluzioni che si imparano sono innumerevoli e le metodologie usate sono valide ancora oggi, sebbene gli strumenti di lavoro siano completamente diversi. Molte delle soluzioni portano alla luce poi le problematiche che schiere di ingegneri hanno dovuto affrontare per la prima volta nella storia dell’uomo, ed anche il valore che pochi dati, alla luce delle esperienze di oggi, hanno prodotto nel campo della conoscenza del Sistema Solare e dell’universo. BIS-Italia si propone di mantenere vivo l’interesse tecnico per queste missioni, perché è una delle chiavi per formare ingegneri, tecnici ed appassionati, dalla mente più aperta e dalle competenze più ampie.
Riferimenti
- Schneiderman, James, Reiff: “Recent Mariner Spacecraft Design and Flight” – Acta Astronautica, Vol. 11 No. 2, March-April 1965
- NASA Technical Report No. 32-740: “Mariner Mars 1964 Project Report”